Собственно плата с dx.com.
Теперь задача ее как-то использовать/протестировать. Пытаемся найти что-то в сети, но ничего адекватного нету. Вернее конечно что-то есть, но все подогнанное под что-то индивидуальное и не совсем понятно как использовать, да и объяснений толком нет. Нельзя сказать, что совсем ничего не нашел по делу, например http://codeyoung.blogspot.ru/2009/11/adxl345-accelerometer-breakout-board.html - вполне ничего так статья, только на не по нашему.
Итак, немного поразмыслив, почитав datasheet, понимаем, что ADXL345 питается от 3.3В, а Arduino от 5В, но у последней есть выход через регулятор на нужные 3.3В. На нашей плате ADXL345 правда тоже есть пин на 5В, но не трудно заметить, что он подключен к регулятору, через который также получается 3.3В и они выводятся на отдельный вход/выход, т.е. как бы мы не подключали, а 3.3В мы получим.
Еще есть различие что на нашу плату выведен контакт VS (от платы указанной в статье, что указал выше). Если правильно понял, то на данный контакт необходимо подавать 2.5В которые определяют границу между HIGH и LOW уровнями цифровых входов/выходов, но его можно и не подключать, видимо потому про него и не упоминают. Собственно на схеме в datasheet VS также не используется, видимо, если 0, то default 2.5В.
Подключить можно по двум интерфейсам или I2C (почему-то все только его и используют) или SPI.
Пока необходимо проверить работает ли вообще наше творение, а оно может и не работать, например в данной посылке мне пришел еще компактный картридер стоимостью в 1$, который "почти совсем" не завелся, а потому решено подключить пока по известному пути, т.е. I2C.
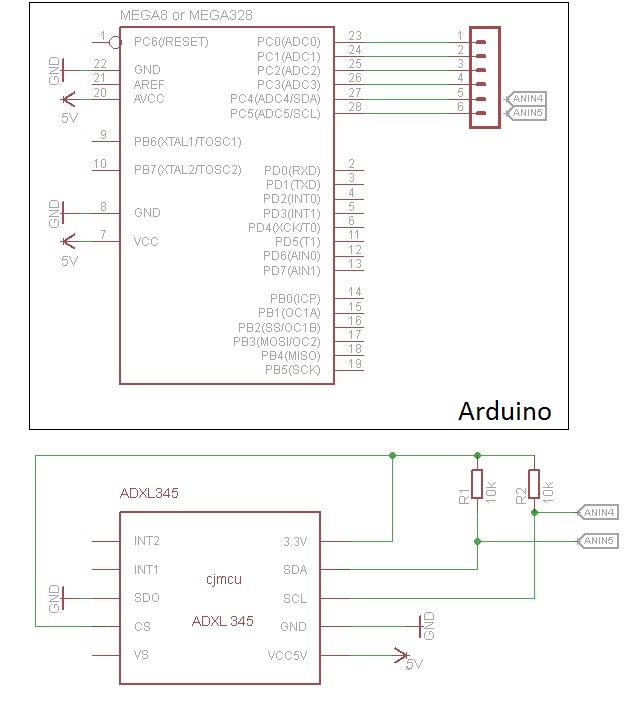
Если 5В на плате ADXL345 не предусмотрено, то надо питать все от 3.3В, которые можно стянуть с той же Arduino. У меня же есть 5В, но я далее все-равно буду использовать 3.3В для подтяжки I2C, чтобы не использовать согласование уровней, т.е. ADXL345 будет нормально воспринимать 3.3В поскольку это его нормальное питание, а для Arduino 3.3В более чем достаточно чтобы считать его HIGH, а сама она 5В на выход не даст, если конечно вы сами не сконфигурируете нужный выход на это, чем рискуете спалить ADXL345. Сам интерфейс работает по двум проводам, которые называются SCL и SDA, а на Arduino соответственно AnalogIn4 и AnalogIn5 (они же SDA и SCL на МК). Почему-то считается, что все это за ранее знают и почти ни кто не упоминает детали
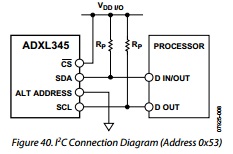
На схеме из datasheet есть мистический Alt Address, которого у нас вроде нет, что немного смущает, но, немного поразмыслив, понимаем, что это ножка SDO, т.е. ее надо прижать к земле.
ИТОГО: Мы тянем к Arduino или любому др. МК всего 4 провода 5В/3.3В, GND, SCL и SDA по такой схеме (ARDUINO я на схеме сильно упростил, т.е. оставил только то что, необходимо подключить к ADXL345).
получилось вот так:
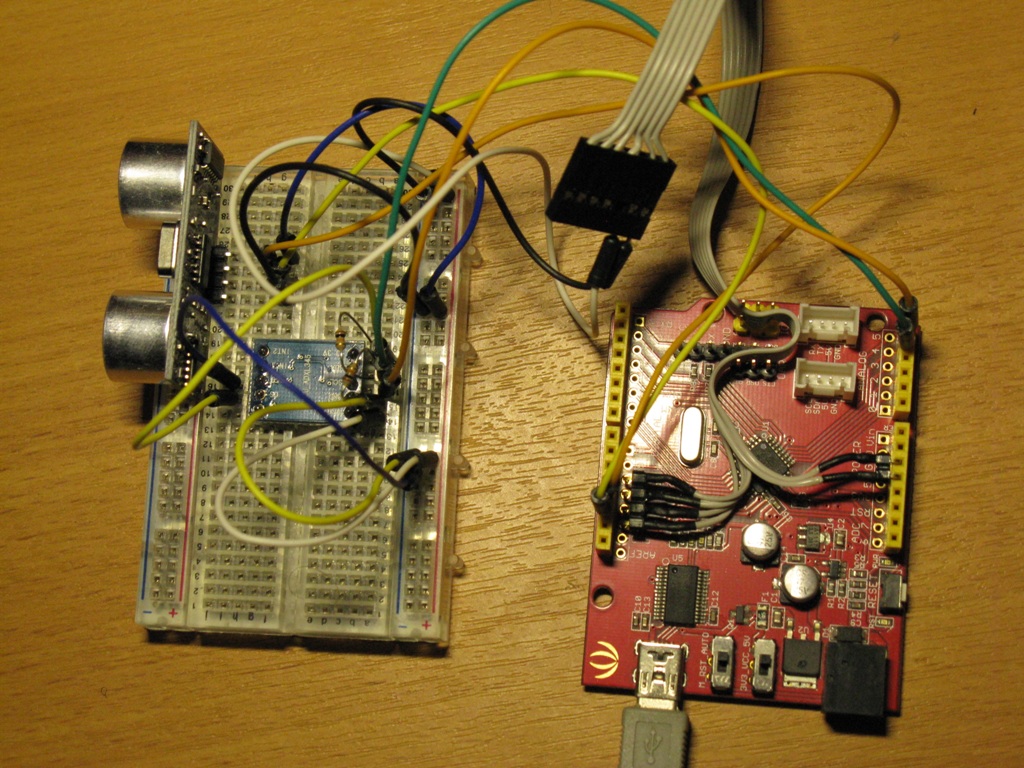
Только у меня на макетке еще и дальномер (планирую их вместе использовать для навигации).
Теперь нужно научиться общаться с ADXL345.
для чего используем такую функцию для передачи настроек:
Код: Выделить всё
void writeTo(int device, byte address, byte val) {
Wire.beginTransmission(device); //start transmission to device
Wire.write(address); // send register address
Wire.write(val); // send value to write
Wire.endTransmission(); //end transmission
}Если мы хотим получить данные, то принцип общения похож, но главное отличие что в ответ мы можем получить не 1 байт, а несколько.
Код: Выделить всё
void readFrom(int device, byte address, int num, byte buff[]) {
Wire.beginTransmission(device); //start transmission to device
Wire.write(address); //sends address to read from
Wire.endTransmission(); //end transmission
Wire.beginTransmission(device); //start transmission to device (initiate again)
Wire.requestFrom(device, num); // request 6 bytes from device
int i = 0;
while(Wire.available()) //device may send less than requested (abnormal)
{
buff[i] = Wire.read(); // receive a byte
i++;
}
Wire.endTransmission(); //end transmission
}Вот так мы начнем наш скетч:
Код: Выделить всё
#include <Wire.h>
#define DEVICE (0x53) //ADXL345 device address
#define TO_READ (6) //num of bytes we are going to read each time (two bytes for each axis)
byte buff[TO_READ] ; //6 bytes buffer for saving data read from the device
char str[512]; //string buffer to transform data before sending it to the serial portДалее проинициализируем наше устройство:
Код: Выделить всё
void setup()
{
Wire.begin(); // join i2c bus (address optional for master)
Serial.begin(9600); // start serial for output
//Turning on the ADXL345
writeTo(DEVICE, 0x2D, 0);
writeTo(DEVICE, 0x2D, 16);
writeTo(DEVICE, 0x2D, 8);
}Теперь начнем получать данные:
Код: Выделить всё
void loop()
{
int regAddress = 0x32; //first axis-acceleration-data register on the ADXL345
int x, y, z;
readFrom(DEVICE, regAddress, TO_READ, buff); //read the acceleration data from the ADXL345
//each axis reading comes in 10 bit resolution, ie 2 bytes. Least Significat Byte first!!
//thus we are converting both bytes in to one int
x = (((int)buff[1]) << 8) | buff[0];
y = (((int)buff[3])<< 8) | buff[2];
z = (((int)buff[5]) << 8) | buff[4];
//we send the x y z values as a string to the serial port
sprintf(str, "%d %d %d", x, y, z);
Serial.print(str);
Serial.write(10);
//It appears that delay is needed in order not to clog the port
delay(15);
}Теперь можно искать библиотеки adxl345.h, где за нас уже продумали различные варианты общения с акселерометром, чтобы нам самим не заботится о преобразовании данных или настройке акселерометра, но зато мы знаем как оно работает. В даташите описано еще много регистров для настроек и вариантов использования онных, но это уже др. история...